
Электродвигатели являются неотъемлемой частью современного промышленного и бытового оборудования. Они используются в различных сферах: от бытовой техники до сложных производственных систем. Эффективное управление электродвигателями имеет решающее значение для повышения производительности, снижения энергопотребления и улучшения эксплуатационных характеристик. В этой статье мы рассмотрим основные способы управления электродвигателями, включая управление скоростью, моментом и положением.
1. Управление напряжением
Одним из самых простых методов управления электродвигателем является регулировка напряжения питания. Изменение напряжения, подаваемого на двигатель, позволяет управлять его скоростью. Этот метод особенно эффективен для двигателей постоянного тока (DC) и асинхронных двигателей с фазным ротором.
Преимущества:
- Простота реализации.
- Низкая стоимость оборудования.
Недостатки:
- Ограниченная точность управления.
- Потери энергии в виде тепла.
2. Импульсно-широтная модуляция (ШИМ)
Импульсно-широтная модуляция (ШИМ) является одним из наиболее популярных методов управления скоростью электродвигателей постоянного тока. Суть метода заключается в подаче на двигатель последовательности импульсов напряжения с изменяемой шириной, что позволяет эффективно регулировать среднюю мощность, подаваемую на двигатель.
Преимущества:
- Высокая точность управления.
- Низкие потери энергии.
- Возможность работы с широким диапазоном скоростей.
Недостатки:
- Сложность схемотехнической реализации.
- Возможность появления электромагнитных помех.
3. Частотное управление
Частотное управление, или управление частотой вращения, широко используется для асинхронных двигателей с короткозамкнутым ротором. Основной принцип заключается в изменении частоты напряжения, подаваемого на двигатель. Для этого используются частотные преобразователи, которые позволяют плавно регулировать частоту и амплитуду напряжения.
Преимущества:
- Плавное регулирование скорости.
- Высокая эффективность.
- Уменьшение пусковых токов.
Недостатки:
- Высокая стоимость оборудования.
- Сложность настройки.
4. Управление током
Управление током применяется для двигателей постоянного тока и синхронных двигателей с постоянными магнитами. Основная идея состоит в регулировке величины тока, протекающего через обмотки двигателя. Для этого используются специальные регуляторы тока, которые позволяют поддерживать заданный уровень тока независимо от изменений нагрузки.
Преимущества:
- Высокая точность управления моментом.
- Стабильность работы при изменении нагрузки.
Недостатки:
- Сложность реализации системы управления.
- Необходимость использования дорогих компонентов.


5. Векторное управление
Векторное управление, или управление по методу косинусного вектора, является одним из самых продвинутых методов управления асинхронными и синхронными двигателями. Этот метод основан на преобразовании координат токов и напряжений векторных величин, что позволяет управлять магнитным потоком и моментом двигателя независимо друг от друга.
Преимущества:
- Высокая точность управления скоростью и моментом.
- Быстрое реагирование на изменения нагрузки.
- Возможность работы в широком диапазоне скоростей.
Недостатки:
- Сложность математических расчетов и алгоритмов управления.
- Высокая стоимость реализации.
6. Датчиковое и бездатчиковое управление
Управление электродвигателем можно разделить на два основных типа: датчиковое (с использованием физических датчиков) и бездатчиковое (без использования физических датчиков). Каждый из этих типов имеет свои преимущества и недостатки, а выбор между ними зависит от конкретных требований и условий эксплуатации.
Датчиковое управление
Датчиковое управление включает в себя использование различных датчиков для измерения параметров работы двигателя. Эти параметры могут включать скорость вращения, положение ротора, ток и напряжение на обмотках двигателя. Наиболее распространенные датчики, используемые в системах управления электродвигателями, включают:
- Энкодеры: Оптические или магнитные датчики, которые измеряют угловое положение ротора и позволяют точно определить его скорость и направление вращения.
- Тахометры: Устройства, измеряющие скорость вращения вала двигателя. Тахометры могут быть механическими, оптическими или магнитными.
- Датчики тока: Измеряют ток, протекающий через обмотки двигателя, что позволяет контролировать нагрузку и предотвращать перегрузки.
- Датчики напряжения: Измеряют напряжение на обмотках двигателя, что помогает контролировать подаваемую мощность.
Преимущества датчикового управления:
- Высокая точность: Использование датчиков позволяет достичь высокой точности управления скоростью и положением ротора.
- Быстрая реакция: Система быстро реагирует на изменения нагрузки и других параметров, обеспечивая стабильную работу двигателя.
- Надежность: Датчики предоставляют точную информацию о текущем состоянии двигателя, что повышает надежность системы управления.
Недостатки датчикового управления:
- Высокая стоимость: Датчики и сопутствующая электроника могут значительно увеличить стоимость системы управления.
- Сложность монтажа: Установка и калибровка датчиков требуют дополнительных усилий и могут быть трудоемкими.
- Уязвимость к повреждениям: Датчики могут быть подвержены механическим повреждениям и износу, что может привести к сбоям в работе системы.
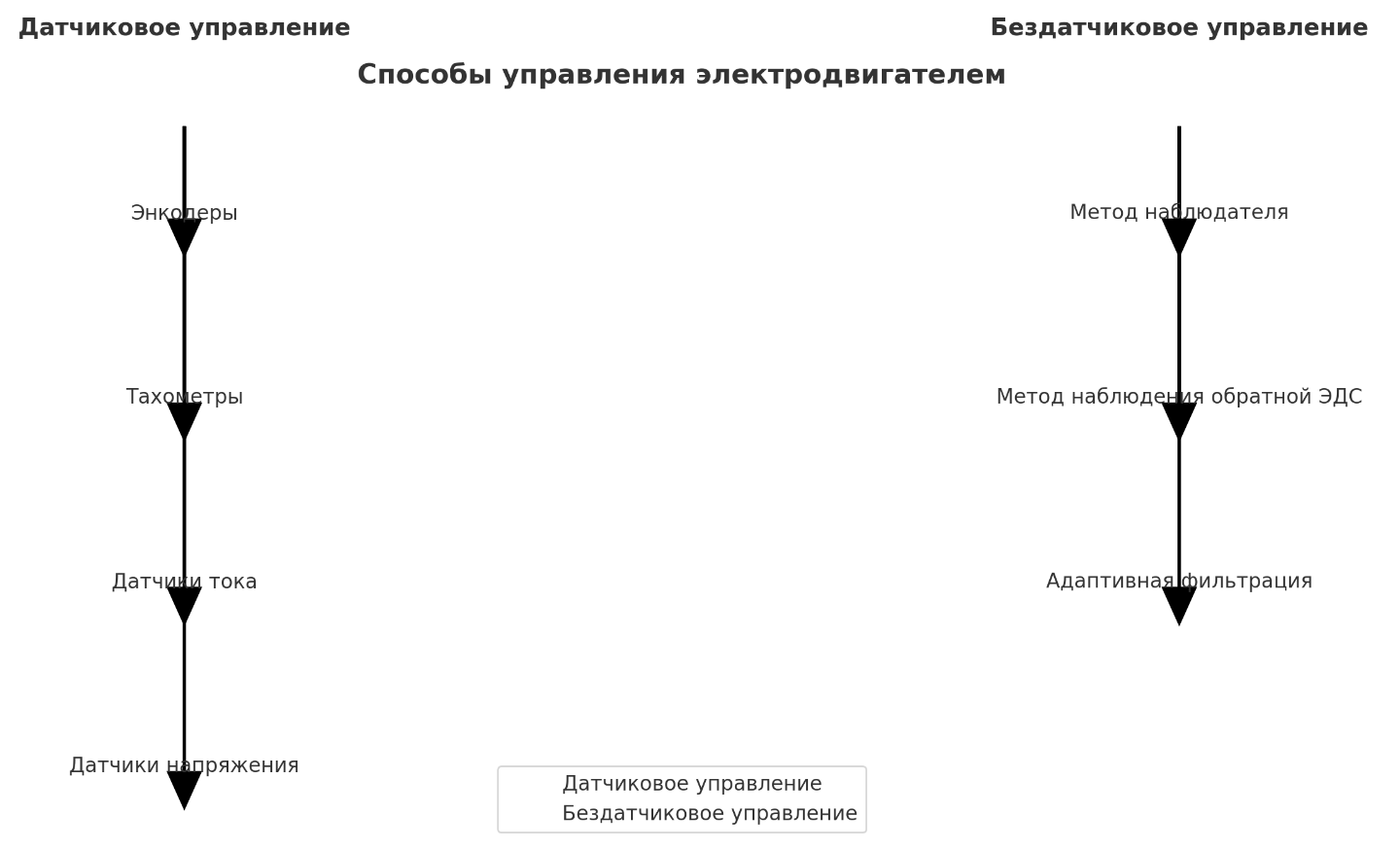
Эта схема наглядно демонстрирует различные подходы к управлению электродвигателями, что помогает лучше понять их преимущества и недостатки
Бездатчиковое управление
Бездатчиковое управление основано на алгоритмах, которые вычисляют необходимые параметры двигателя (например, положение и скорость ротора) по косвенным данным, таким как напряжение и ток на обмотках двигателя. Этот метод часто используется для асинхронных и синхронных двигателей с постоянными магнитами.
Основные алгоритмы бездатчикового управления включают:
- Метод наблюдателя: Использует математическую модель двигателя для оценки состояния ротора на основе измеренных токов и напряжений.
- Метод наблюдения обратной ЭДС: Основан на измерении и анализе обратной электродвижущей силы (ЭДС), возникающей в обмотках двигателя при вращении ротора.
- Алгоритмы адаптивной фильтрации: Используют сложные фильтры и методы обработки сигналов для выделения информации о положении и скорости ротора из шумных данных.
Преимущества бездатчикового управления:
- Низкая стоимость: Отсутствие физических датчиков снижает общую стоимость системы управления.
- Простота реализации: Упрощает процесс монтажа и обслуживания, так как не требуется установка и калибровка датчиков.
- Повышенная надежность: Снижение количества компонентов, подверженных механическим повреждениям, увеличивает надежность системы.
Недостатки бездатчикового управления:
- Ограниченная точность: Бездатчиковые системы могут быть менее точными по сравнению с датчиковыми, особенно при низких скоростях.
- Зависимость от условий эксплуатации: Работа алгоритмов бездатчикового управления может ухудшаться при изменении температуры, влажности и других внешних факторов.
- Сложность алгоритмов: Разработка и настройка бездатчиковых алгоритмов требует высокого уровня знаний и опыта в области теории управления и обработки сигналов.
Заключение
Эффективное управление электродвигателями играет ключевую роль в современных промышленных и бытовых системах. Выбор метода управления зависит от конкретных требований к системе, таких как точность управления, стоимость оборудования и условия эксплуатации. Простые методы, такие как управление напряжением, подходят для базовых применений, тогда как более сложные методы, такие как векторное управление, обеспечивают высокую точность и производительность для критически важных приложений.

